
Products
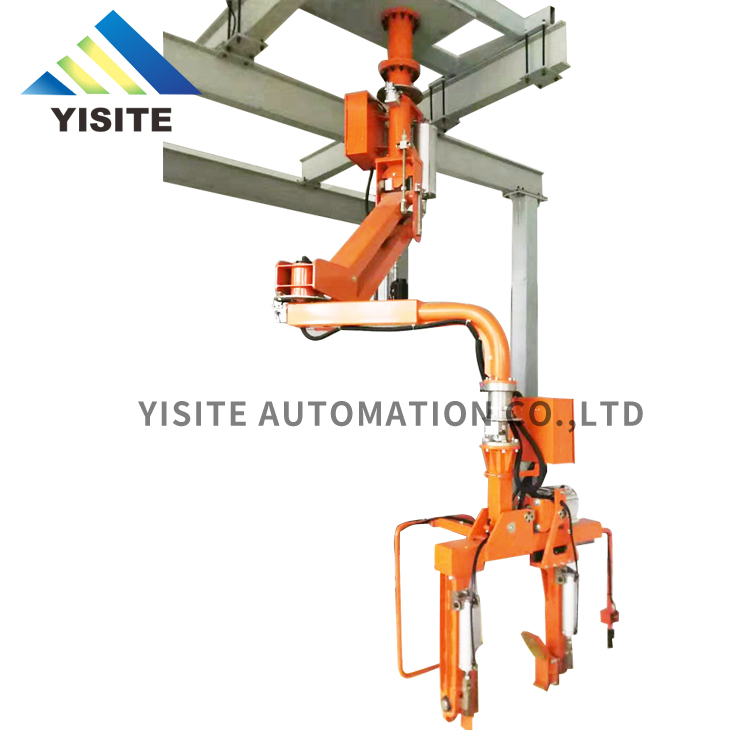


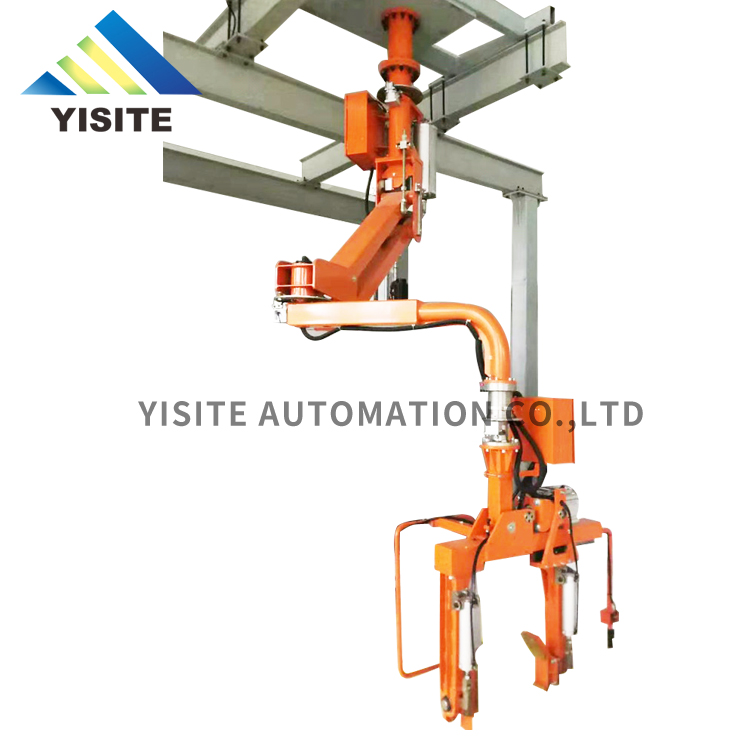
suspension Jib Cranes Manipulator
Short Description:
The suspension booster manipulator consists of the installation base, host and steel arm rod, fixture.The main arm can be rotated 360 degrees, the second arm rod can be rotated 270 degrees to achieve the working range of coverage, and the rotation can add the brake mechanism.It is suitable for high-frequency handling, positioning, component assembly and other occasions.



about us

We are a professional customized automation equipment manufacturer. Our products include depalletizer, pick and place packing machine, palletizer, robot integration application, loading and unloading manipulators, carton forming,carton sealing,pallet dispensper,wrapping machine and other automation solutions for back-end packaging production line.
Our factory area is about 3,500 square meters. The core technical team has an average of 5-10 years of experience in mechanical automation, including 2 mechanical design engineers. 1 programming engineer, 8 assembly workers, 4 after-sales debugging person, and other 10 workers
Our principle is “customer first, quality first, reputation first”, we always help our customers “increase production capacity, reduce costs, and improve quality” we strive to become a top supplier in the machinery automation industry.
Product characteristics
By detecting the suction cup or the end of the manipulator and balancing the gas pressure in the cylinder, it can automatically identify the load on the mechanical arm, and automatically adjust the air pressure in the cylinder through the pneumatic logic control circuit, to achieve the purpose of automatic balance.When it’s working, heavy objects are like being suspended in the air, which can avoid the collision of product docking.Within the working range of the mechanical arm, the operator can easily move it back, left and down to any position, and the person itself can easily operate.At the same time, the pneumatic circuit also has chain protection functions such as preventing accidental object loss and pressure loss protection

The working principle and mode of the suspension power manipulator:
By detecting the suction cup or the end of the manipulator and balancing the gas pressure in the cylinder, it can automatically identify the load on the mechanical arm, and automatically adjust the air pressure in the cylinder through the pneumatic logic control circuit, to achieve the purpose of automatic balance.When working, heavy objects are like being suspended in the air, which can avoid the collision of product docking.Within the working range of the mechanical arm, the operator can easily move it back, left and down to any position, and the person itself can easily operate.At the same time, the pneumatic circuit also has chain protection functions such as preventing accidental object loss and pressure loss protection
Features
Max payload. 900 Kg
Max Action radius: 4500 mm
Vertical Travel: 0,5m/min
Control system: 2200 mm
Control system: air fully pneumatic
Supply: compressed air (40 µm),no contain grease
Working pressure: 0.7 ÷ 0.8 Mpa
Working temperature: +0° a +45° C
Noise: air consumption: 100 Nl ÷ 400 N per cycle
Rotation: Column shaft and fixture shaft 360° continuous rotation,middle shaft 300° continuous rotation







